What is the difference between IR sensors vs. Ultrasonic sensors?
The biggest difference between IR sensor vs. ultrasonic sensors is the way in which the sensor works. Ultrasonic sensors use sound waves (echolocation) to measure how far away you are from an object. On the other hand, IR sensors use Infrared light to determine whether or not an object is present.
Accuracy and reliability are also big differentiators in these sensors. Most often, ultrasonic sensors will provide you more reliable and accurate data than IR sensors. If you want an accurate, numerical representation of distance for your project, I’d almost always choose an Ultrasonic sensor.
However, if you only need to know if an object is present or not, then an IR sensor is easier to implement. Now, let’s talk a little bit more about both of these sensors and their technical specifications.
What are IR Sensors?
IR sensors use an infrared transmitter and receiver to emit and detect objects. Most IR obstacle avoidance sensors are less than $1 each, making them an affordable option for hobby projects. Here’s a close-up of an IR sensor module.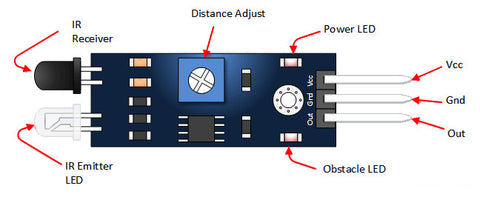
You can adjust the distance on the IR sensor by rotating the potentiometer. This will make the IR sensor more or less sensitive to objects.
IR Sensor with Arduino
Here’s how to connect an IR sensor to an Arduino Uno. The IR sensor has 3 pins: GND, Vcc, and Signal. The signal pin can be connected to a digital or analog pin on the Arduino.
Parts Required
- IR sensor module
- Arduino Uno
- Breadboard
- Jumper wires
IR Sensor pin diagram (Digital)
If you just want to know if the sensor is active or not, then I recommend using a digital reading. The sensor will read a 1 or 0 if it’s triggered or not.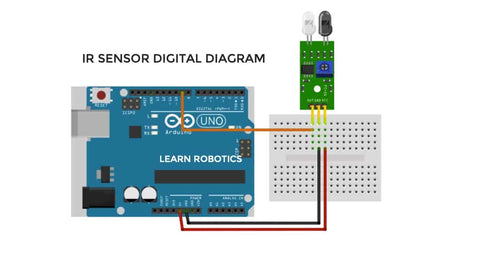
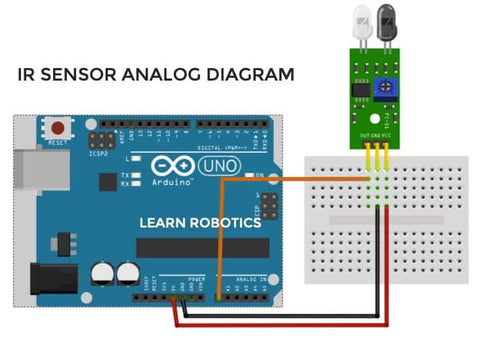
IR Sensor pin diagram (Analog)
Furthermore, if you want a full 10-bit range of readings, then you’ll want to wire the signal pin on the IR sensor into an analog pin on the Arduino. The sensor will provide a reading in the range of 0-1023 that you can use to make decisions or map the readings to a distance curve.
Code IR Sensor with Arduino
First, wire the IR Sensor to the Arduino. Then upload the IR sensor code example, below.
/*
* Example code to read an IR sensor with Arduino
*/
int IR = 9;
void setup() {
// put your setup code here, to run once:
pinMode(IR, INPUT);
Serial.begin(9600); //initialize the serial monitor
}
void loop() {
// put your main code here, to run repeatedly:
digitalRead(IR);
Serial.print("IR reading = ");
Serial.println(IR);
delay(2000);
}
Enter your email below to download the Arduino Sketch (.ino).
Now, let’s review the code. You’ll start by defining the signal pin that the IR sensor is connected to. Next, declare your pin as an INPUT to the Arduino. We’ll be collecting data from the environment to the controller, which is known as an Input.
Finally, in the loop() method, read the signal pin every three seconds using the analogRead() or digitalRead() command. Open up the Serial Monitor to view the readings from your sensor. Lastly, you can adjust this code to best align with your application.
Applications for IR Sensors
Popular applications for IR sensors include line following (and avoiding) for mobile robots, Tripwires, Flame Detection, and even motion detection (PIR). For flame detection and motion detection, you’ll have to buy a specific flame sensor and PIR sensor, respectively.
What are Ultrasonic Sensors?
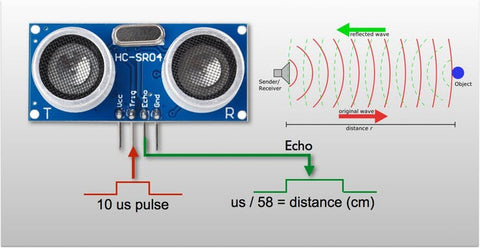
Ultrasonic sensors use soundwaves to transmit and receive information over a duration. The duration is then converted to a distance measurement based on the Speed of Sound (340 m/s). There are ultrasonic sensors at every price point. If you’re looking for something affordable for your hobby project, I recommend the HC-SR04. Here’s a close-up of an ultrasonic sensor module.
Ultrasonic Sensor with Arduino
Here’s how to connect an ultrasonic sensor to an Arduino Uno. The ultrasonic sensor has two versions: PING (3-pin) or HC-SR04 (4-pin). Both versions have GND and Vcc pins. PING has a dual signal pin that can be used as both an INPUT and an OUTPUT. The HC-SR04 has two separate signal pins: one for the transmitter (Trig) and one for the receiver (Echo). The signal pins are connected to digital pins on the Arduino.
Parts Required
- PING or HC-SR04 module
- Arduino Uno or Arduino Uno Basic Kit
- Breadboard
- Jumper wires
HC-SR04 Ultrasonic Sensor (4-pin)
The HC-SR04 Ultrasonic sensor works with 4 pins: GND, Vcc, Trig (OUTPUT), and Echo (INPUT). Here’s a pin diagram for Arduino using the HC-SR04.

PING Ultrasonic Sensor (3-pin)
The PING ultrasonic sensor works with 3 pins: GND, Vcc, and Signal. Here’s a pin diagram for Arduino using the PING sensor.
Code Ultrasonic Sensor with Arduino
Once you have your sensor wired, you’ll write some code to send out a pulse, calculate the duration, and then convert it to a distance measurement. Here’s some example code for the PING sensor, below.
/*
* Example Code for Parallax PING Sensor
*/
const int sig = 9;
void setup() {
Serial.begin(9600);
}
void loop() {
long duration, inches, cm;
// The PING sensor is triggered by a HIGH pulse of 2 or more microseconds.
// Give a short LOW pulse beforehand to ensure a clean HIGH pulse:
pinMode(sig, OUTPUT);
digitalWrite(sig, LOW);
delayMicroseconds(2);
digitalWrite(sig, HIGH);
delayMicroseconds(5);
digitalWrite(sig, LOW);
//read duration from the original pulse
pinMode(sig, INPUT);
duration = pulseIn(sig, HIGH);
// convert the time into a distance
inches = microsecondsToInches(duration);
cm = microsecondsToCentimeters(duration);
Serial.print(inches);
Serial.print("in, ");
Serial.print(cm);
Serial.print("cm");
Serial.println();
delay(100);
}
long microsecondsToInches(long microseconds) {
// According to Parallax's datasheet for the PING))), there are 73.746
// microseconds per inch (i.e. sound travels at 1130 feet per second).
// This gives the distance travelled by the ping, outbound and return,
// so we divide by 2 to get the distance of the obstacle.
// See: https://www.parallax.com/dl/docs/prod/acc/28015-PING-v1.3.pdf
return microseconds / 74 / 2;
}
long microsecondsToCentimeters(long microseconds) {
// The speed of sound is 340 m/s or 29 microseconds per centimeter.
// The ping travels out and back, so to find the distance of the object we
// take half of the distance traveled.
return microseconds / 29 / 2;
}
Now, let’s review the code. You’ll start by defining the signal pin(s) that the ultrasonic sensor is connected to. Next, declare your signal (trig) pin as an OUTPUT to the Arduino. Set the pin to LOW for 2 microseconds, then HIGH for 5 microseconds, and then LOW for 2 microseconds. Then, declare the signal pin (echo) as an INPUT and capture the time duration using the pulseIn() method.
Once you have the duration, you’ll need to convert it to a distance. This can be done using the speed of sound conversion factors in inches or centimeters. The datasheet for your sensor should outline these conversion factors. You can adjust this code to best align with your application.
Applications for Ultrasonic Sensors
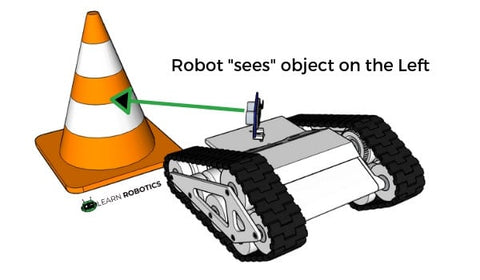
Mobile Robot Object Avoidance
Ultrasonic sensors are often used on mobile robots to avoid objects. You can use an array of HC-SR04 sensors and determine which way to move depending on which sensor has the highest distance reading. This will tell you that objects are farther away and it’s therefore, safer to move in that direction.
Distance or Height Calculations
The HC-SR04 is great for measuring levels. For example, you can determine how much snow is on the ground or the level of a tank.